三维坐标系介绍
三维直角坐标系是一个很常见的概念,任何的三维空间计算都需要用到三维直角坐标系。但是由于历史问题,在图形学中,没有制定统一标准,很多系统使用的坐标系标准都不太一样。在这篇文章中,我们进行一个介绍和梳理。
左手坐标系与右手坐标系
由于三维空间的复杂性,坐标轴的定义多种多样。这里先介绍一个概念:手性(Chirality)。
- 手性1
- 如果某物体与其镜像不同,则其被称为“手性的(英语:chiral)”,且其镜像是不能与原物体重合的,就如同左手和右手互为镜像而无法叠合。手性物体与其镜像被称为对映体(enantiomorph,希腊语意为“相对/相反形式”);在有关分子概念的引用中也被称为对映异构体。可与其镜像叠合的物体被称为非手性的(achiral),有时也称为双向的(amphichiral)。
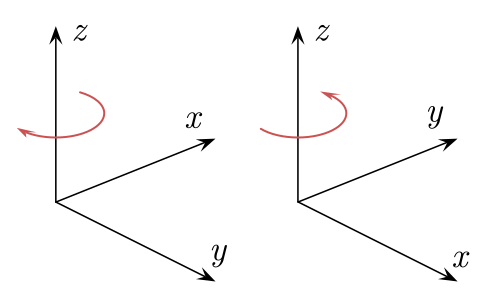
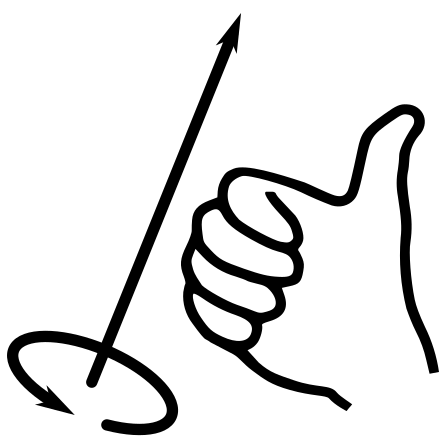
左手坐标系和右手坐标系无法通过旋转和位移重合。那么如何判断一个坐标系是左手坐标系还是右手坐标系呢?我们可以使用高中物理课时学到的右手螺旋定则,我们使用右(左)手大拇指朝向z轴正方向,如果x轴到y轴的方向符合其余手指的方向,则为右(左)手坐标系。如下图所示。
在右手坐标系中,能够直接使用数学运算和物理中的右手定则,而在左手坐标系中则需要对方向进行取反。建议使用右手坐标系,免得数学运算忘记取负出bug。
坐标系表示
然而即便同样是右手坐标系,每个系统中定义的轴的方向也不太一样。有的z轴方向向上,有的z轴方向向下,有的y轴向上,等等情况。
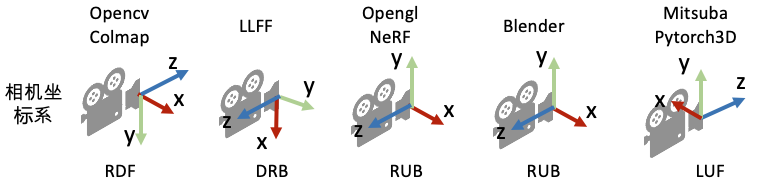
此时我们可以根据XYz轴的方向来标记坐标系。以COLMAP和OpenCV的坐标系为例,它们的坐标系中,x轴正方向向右R(ight),y轴正方向向下D(own),z轴正方向向前(Forward),则该坐标系可以表示为RDF。
同理,Unity坐标系是左手坐标系,x轴正方向向右R(ight),y轴正方向向上U(p),z轴正方向向前F(orward),则Untiy坐标系可以被表示为RUF。
至此,任意朝向的坐标系都能被这种方式表示出来。下图2展示了一些系统的坐标系表示。
常用系统坐标系表示
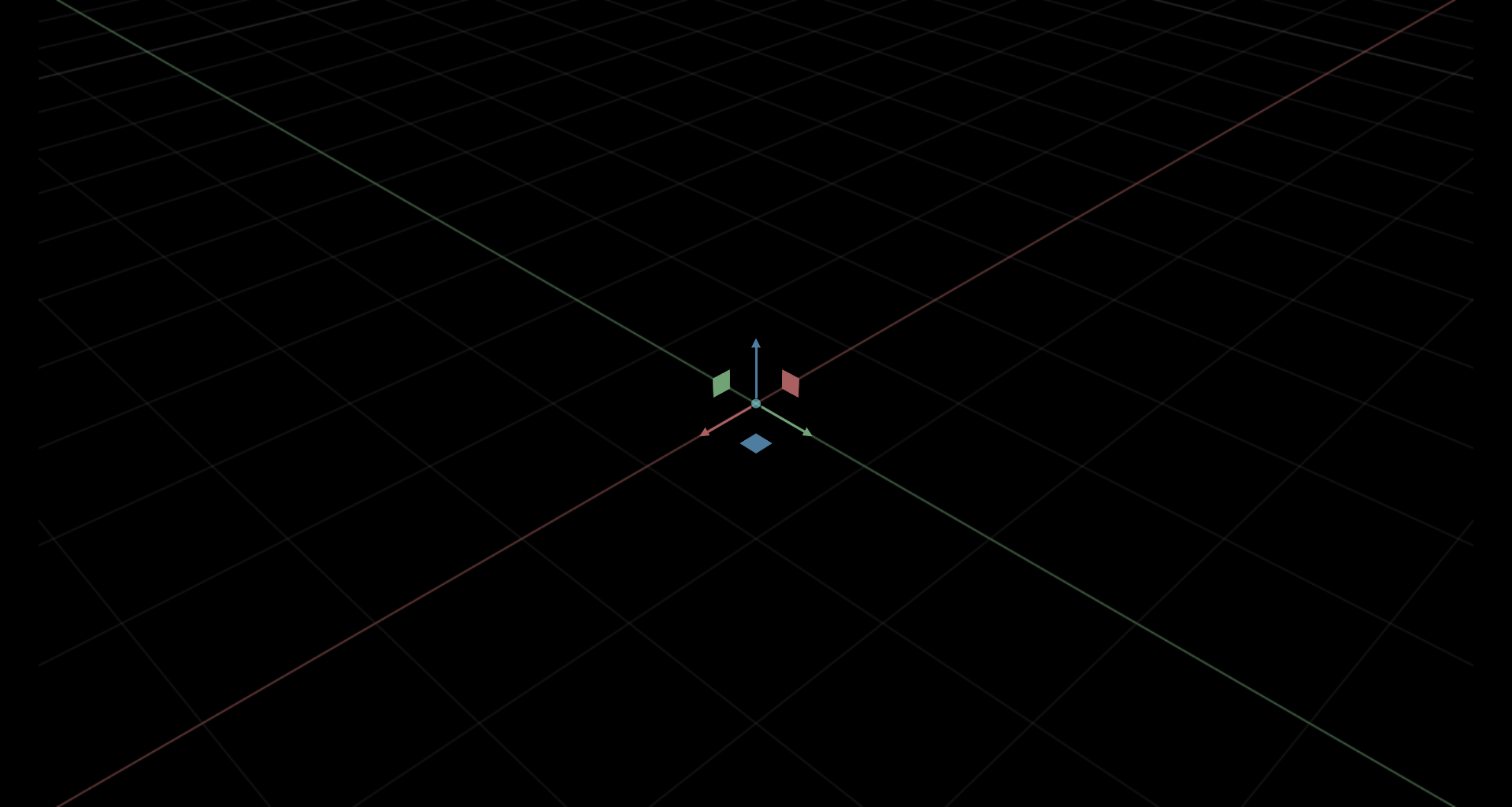
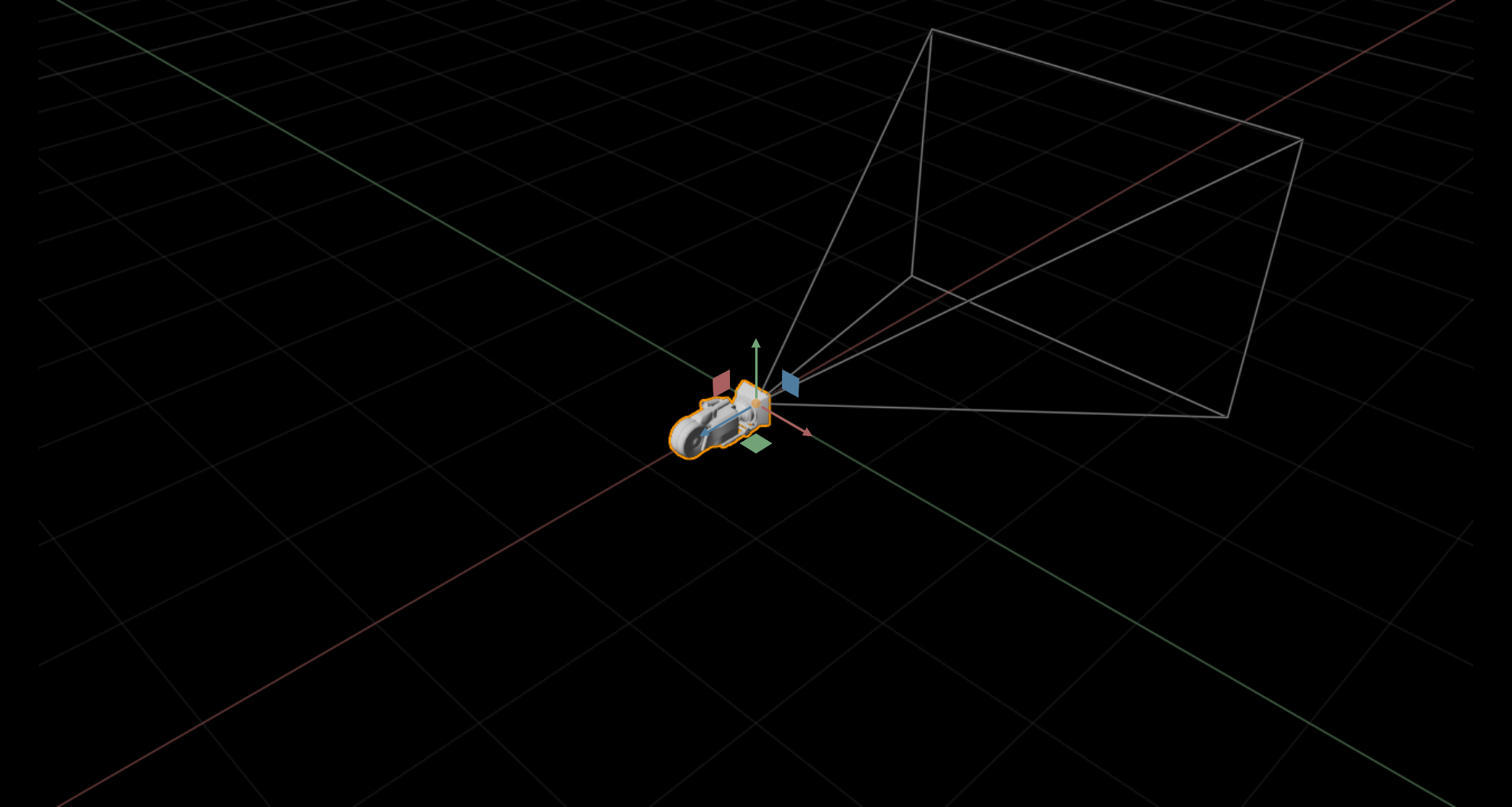
需要注意的是有些系统里面世界坐标系和相机坐标系不是一致的,比如Omniverse3(见下图)。
右手坐标系
| 系统 | 相机坐标系 | 世界坐标系 |
|---|---|---|
| OpenCV | RDF | x |
| COLMAP | RDF | x |
| OpenGL | RUB | x |
| Blender | RUB | RFU |
| Omniverse | RUB | FLU |
| NeRF | RUB | x |
| Gaussian Splatting | RDF | x |
左手坐标系
| 系统 | 相机坐标系 | 世界坐标系 |
|---|---|---|
| Unity | RUF | RUF |
| Unreal | RBU | x |
坐标系转换
既然我们发现已经有不同的坐标系表示了,那么我们应该如何把在自己的项目中统一起来呢,这个时候就需要用到坐标系转换了。
坐标系转换公式推导
我们先讲基础的二维坐标系变换。假设我们有两个坐标系\(xoy\)和\(uev\)和空间中的点\(\mathbf{p}\),如下图3所示。
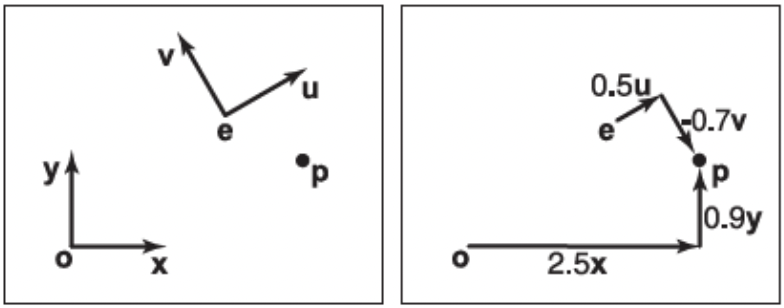
在\(xoy\)坐标系内,\(\mathbf{p}\)可以被表示为:
同样的,\(\mathbf{p}\)在\(uev\)坐标系里可以被表示为:
如果,我们将\(\mathbf{e}\),\(\mathbf{u}\),\(\mathbf{v}\)用\(\mathbf{o}\),\(\mathbf{x}\),\(\mathbf{y}\)进行替换并用矩阵表示,则能够得到:
通过矩阵的形式,我们可以将这个表达式看成是先旋转再平移。
简化以后得到另外一种表示:
因为\(\mathbf{u}\),\(\mathbf{v}\)都是单位向量且正交,所以这个矩阵也就是由旋转和位移组成的转换矩阵。
同理,我们将\(\mathbf{o}\),\(\mathbf{x}\),\(\mathbf{y}\)用\(\mathbf{e}\),\(\mathbf{u}\),\(\mathbf{v}\)进行替换并用矩阵表示,能够得到:
这个形式也就是先平移再旋转,也就是公式(1)的逆变换。也就是:
不同系统的坐标系转换
我们先介绍同一手性坐标系的转换,比如同为右手坐标系的转换。在这里我们以OpenCV坐标系到OpenGL为例,也就是从RDF坐标系到RUB坐标系。
在这里,我们使用RUB坐标系作为世界坐标系。那么,RDF坐标系中的x轴可以表示为\(\mathbf{x}^{RDF}_{RUB}=(1,0,0)^T\),y轴可以表示为\(\mathbf{y}^{RDF}_{RUB}=(0,-1,0)^T\), z轴可以表示为\(\mathbf{z}^{RDF}_{RUB}=(0,0,-1)^T\)。
那么,我们很快就能构建出转换矩阵:
从这个矩阵也很好理解,将y轴取负,将z轴取负,则RDF坐标系就变成了RUB坐标系了。需要注意的是同手性坐标系转换矩阵的前三行前三列是旋转矩阵,可以用转置来求逆。而异手性的坐标系转换矩阵的前三行前三列不是旋转矩阵,不可以用转置来求逆。也就是说异手性的坐标系转换矩阵不是李群。
相机内外参
Misc
矩阵存储格式:
- OpenCV row-major
- Eigne column-major
- CUDA column-major
- glm column-major
Hugin一个可以转换各种投影的工具。
身处相机内外参之间(EG3D/NeRF/3D Gaussian Splatting)